Robotique mobile et technologie AMR :
comment nos robots autonomes naviguent
Un robot mobile autonome n’est pas qu’une plateforme mobile avec des capteurs. C’est un système coordonné où les algorithmes de localisation, la perception, la prise de décision et la logique de sécurité s’exécutent en temps réel sur la même machine, tout en restant interopérables avec le reste de votre environnement industriel.
Comprendre la technologie AMR
AMR vs AGV — Les différences technologiques

L’héritage de la robotique mobile industrielle, c’est l’AGV (Automated Guided Vehicle). Les AGV suivent des trajectoires prédéfinies marquées par des bandes magnétiques, des fils encastrés ou des QR codes au sol. Ils sont fiables, mais rigides. Toute modification du layout impose de retracer le sol, et aucun AGV ne peut éviter un obstacle imprévu : il s’arrête et attend.
L’AMR (Autonomous Mobile Robot) supprime cette dépendance à l’infrastructure. Il construit et met à jour sa propre carte de l’environnement à partir de capteurs embarqués. Il planifie ses propres trajectoires. Il détecte les obstacles en temps réel et les contourne. Remplacer une flotte d’AGV par des AMR fait typiquement passer le taux de complétion des missions de 80-85 % (AGV bloqués par les obstacles) à 96-99 % (AMR qui se réacheminent de manière autonome).
Les composants clés d’un AMR

Un AMR complet combine quatre couches fonctionnelles :
- Perception : scrutateurs LIDAR, caméras, capteurs inertiels, encodeurs moteurs qui perçoivent l’environnement et l’état du robot lui-même.
- Localisation et navigation : algorithmes (SLAM, planification de trajectoires) qui déterminent où le robot se trouve et où il doit aller.
- Logique de décision : un contrôleur temps réel qui transforme le plan de navigation en commandes moteurs et réagit aux événements de sécurité.
- Communication : protocoles (VDA 5050, OPC UA, MQTT) qui intègrent le robot à votre gestionnaire de flotte, votre MES et votre ERP.
Chaque couche doit être étroitement couplée aux autres. Une latence, une dérive ou une lecture capteur manquée dans l’une se propage à tout le système. C’est là que la profondeur d’ingénierie fait la différence.
Modes de fonctionnement de nos AMR
Toutes les missions n’exigent pas la même autonomie. Sur le terrain, un AMR peut alterner entre opération entièrement autonome, collaboration avec un opérateur humain, ou pilotage direct selon le contexte. La gamme HSK supporte trois modes de fonctionnement combinables, sélectionnés depuis l’IHM du robot ou commandés à distance par le gestionnaire de flotte.

les missions répétitives
Mode autonome pour les missions répétitives
C’est le mode par défaut et le plus utilisé en production. L’AMR exécute sa mission de bout en bout sans intervention humaine : il consulte sa carte, sélectionne la trajectoire optimale, traverse les zones de travail en évitant les obstacles, dépose ou récupère sa charge, et retourne à sa station de docking quand sa batterie atteint le seuil de recharge. Ce mode est conçu pour les flux logistiques répétitifs, réapprovisionnement de bord de ligne, évacuation de pièces finies, navette inter-postes.

assister un opérateur
Mode suiveur pour
assister un opérateur
Le robot suit un opérateur à distance constante, en utilisant ses LIDAR et sa caméra pour détecter et tracker la cible. L’opérateur garde les mains libres pour prélever, ranger ou inspecter ; l’AMR transporte la charge. Ce mode est particulièrement adapté à la préparation de commandes en zone dense et à la maintenance itinérante. La distance et la vitesse de suivi sont paramétrables selon l’environnement.

pour les cas exceptionnels
Mode télécommande pour
les cas exceptionnels
L’opérateur prend le contrôle direct du robot via une télécommande sans fil ou une tablette. Utilisé pour le l’instalation initial (premier déplacement sur site, cartographie supervisée), pour les manœuvres de précision dans des zones non couvertes par la carte, pour les déplacements ponctuels hors mission planifiée, ou pour la formation des opérateurs. Le mode télécommande respecte les mêmes limites de sécurité que les modes autonomes les zones de protection LIDAR restent actives en permanence.
Algorithmes de localisation et navigation
C’est la partie la plus exigeante d’un AMR et celle où E-COBOT a fait le choix d’investir en développement propriétaire plutôt que de s’en remettre à une boîte noire tierce.
SLAM : Localisation et cartographie simultanées
Quand un AMR est déployé pour la première fois sur votre site, il ne connaît pas le bâtiment. Il doit le découvrir. SLAM est la famille d'algorithmes qui permet au robot de faire deux choses simultanément : construire une carte de l'environnement et se localiser à l'intérieur de cette carte, en temps réel, en mouvement.
Notre implémentation SLAM repose sur une fusion de données LIDAR, caméra et IMU, avec une boucle de correction continue qui détecte les dérives entre la position estimée et la position réelle. La carte n'est pas construite une fois pour toutes, elle est mise à jour en continu à mesure que l'environnement évolue (palette déplacée, chariot garé différemment). Cela rend l'AMR résilient au rythme imprévisible d'une vraie production.
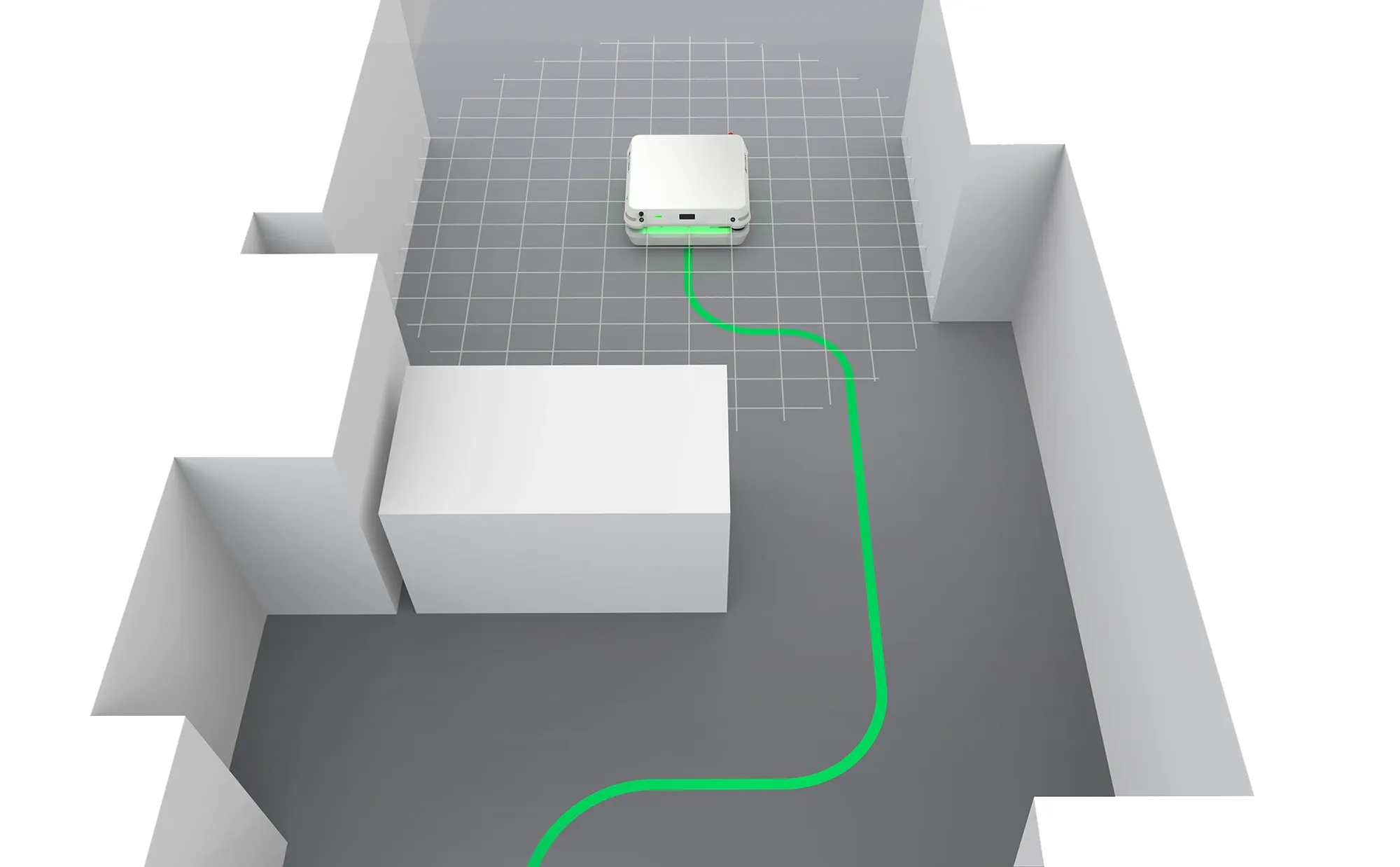
Planification de trajectoires et évitement d'obstacles
Une fois que le robot sait où il est, la question suivante : comment atteindre la destination, compte tenu de tout le reste qui se passe ? Notre planificateur combine une couche globale (A* sur la carte persistante) et une couche locale (Dynamic Window Approach sur la lecture capteur courante). Le plan global est recalculé au démarrage de chaque mission. Le plan local s'ajuste toutes les 100 millisecondes selon les obstacles détectés, un chariot qui entre dans le couloir, un opérateur qui traverse le passage, une palette posée à un emplacement non planifié.
Cette approche à deux couches permet à nos AMR de naviguer dans des environnements partagés avec des humains et des chariots, sans s'arrêter à chaque imprévu mineur.
Pourquoi des algorithmes développés en interne ?
Il est possible de déployer un AMR avec des SDK tiers prêts à l'emploi. Nous avons fait le choix inverse. Trois raisons :
- Paramétrage fin : Chaque environnement industriel a ses spécificités (interférences magnétiques près des cellules de soudure, surfaces réfléchissantes en salle propre, variations d'éclairage dans les entrepôts). Maîtriser l'algorithme nous permet de l'adapter à votre contexte sans dépendre d'un fournisseur.
- Performance : Un SDK boîte noire est optimisé pour le cas médian. Notre implémentation peut être affinée pour les cas difficiles, et cela se voit dans les taux de complétion de missions.
- Continuité : Quand un SDK tiers change ses conditions commerciales ou sa feuille de route, votre flotte AMR en hérite les conséquences. Avec du code interne, vous avez la continuité.
Capteurs et architecture matérielle

Cartographie et détection d'ostacles
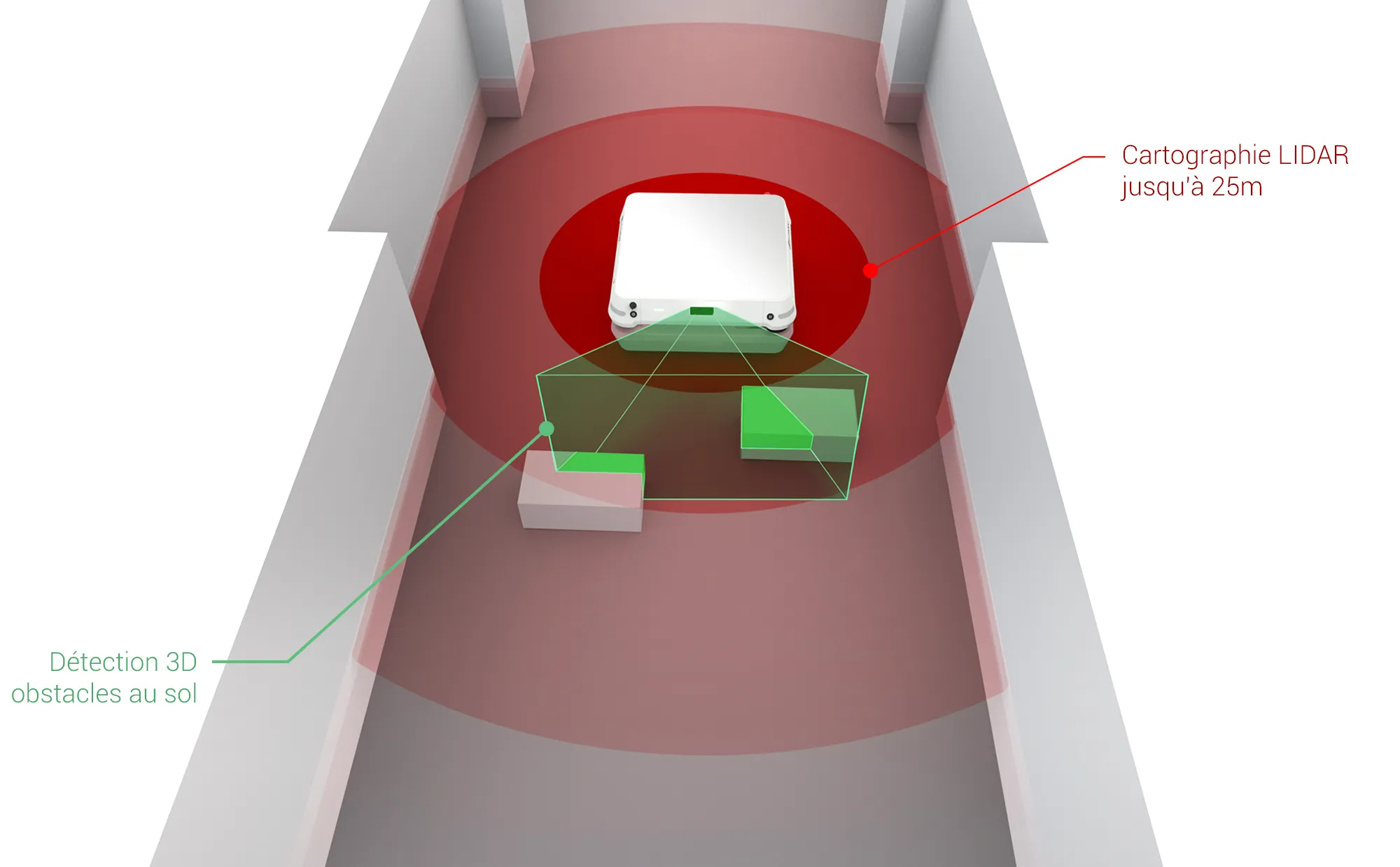
Détection en deux zones
Les LIDAR 2D surveillent en continu deux périmètres configurables autour du robot. À l'approche d'un humain, le robot ralentit puis s'arrête, et signale sa présence par avertisseurs lumineux.
Les AMR embarquent des capteurs certifiés conformes à l'ISO 3691-4, le standard des chariots industriels sans conducteur : LIDAR 2D avec zones de détection configurables, arrêts d'urgence, avertisseurs sonores et lumineux. Ce n'est pas optionnel, tout AMR opérant dans un espace partagé doit satisfaire cette norme, et notre processus de certification le garantit pour chaque unité déployée.
Conformité VDA 5050 : Interopérabilité multi-marques
Qu’est-ce que VDA 5050 ?
VDA 5050 est un standard de communication ouvert, développé à l’origine par l’association allemande de l’industrie automobile (VDA), qui définit comment les robots mobiles autonomes communiquent avec un système de gestion de flotte. Il standardise l’attribution des ordres, la remontée de statut et la gestion des erreurs entre AMR de marques différentes.
Avant VDA 5050, intégrer des AMR de deux fournisseurs différents imposait du middleware sur mesure pour chaque marque et gérer une flotte hétérogène coûtait cher et restait fragile. Avec VDA 5050, n’importe quel AMR conforme peut être piloté par n’importe quel gestionnaire de flotte conforme.
Pourquoi c’est important pour les flottes mixtes ?
Si votre site fait tourner des AMR de plusieurs fournisseurs, par exemple MiR pour le transport et E-COBOT pour la traction, VDA 5050 est ce qui permet à un seul gestionnaire de flotte de les orchestrer. Sans lui, vous êtes verrouillé dans l’écosystème d’un seul fournisseur, et le coût de bascule devient prohibitif.
C’est l’une des raisons pour lesquelles l’adoption de VDA 5050 s’accélère. Les acheteurs industriels ne veulent pas s’engager irrévocablement avec une seule marque d’AMR pour la décennie à venir.

Comment E-COBOT implémente VDA 5050 ?
Notre gamme HSK est entièrement conforme à VDA 5050, ce qui signifie deux choses en pratique. D’une part, nos AMR peuvent être pilotés par n’importe quel gestionnaire de flotte conforme à VDA 5050, le vôtre, le nôtre MyCobot Suite ou celui d’un tiers. D’autre part, notre gestionnaire de flotte MyCobot Suite peut piloter n’importe quel AMR conforme à VDA 5050, et pas seulement les nôtres.
IA embarquée : Intelligence en edge

Notre stack logicielle est construite sur ROS 2 (Robot Operating System 2), le standard open-source de fait pour la robotique moderne. ROS 2 apporte des garanties temps réel, des primitives de sécurité intégrées et un écosystème mature de bibliothèques compatibles, des améliorations sur ROS 1 qui comptent pour l'usage industriel.
Toutes les décisions critiques (sécurité, navigation) s'exécutent sur l'AMR lui-même, pas dans le cloud. Ce n'est pas négociable : un chariot qui croise la trajectoire de l'AMR doit être détecté et évité en quelques millisecondes, sans qu'une latence réseau puisse interférer. Notre architecture edge garantit cela.
Made in France
Pourquoi le Made in France compte pour la technologie AMR
Sourcing matériel
et contrôle qualité
Notre gamme de robots HSK est conçue et assemblée en France, avec des composants sourcés sur un réseau de fournisseurs sélectionnés, européens pour la majorité. Ce n'est pas un argument marketing : cela impacte directement la fiabilité de la chaîne d'approvisionnement, la régularité qualité, et notre capacité à honorer une garantie de 12 mois.
Souveraineté
logicielle
Les algorithmes de localisation et de navigation (la partie la plus stratégique d'un AMR) sont développés et maintenus par les ingénieurs E-COBOT en France. Aucun fournisseur étranger ne peut modifier les conditions de licence ni restreindre l'accès au code source. Pour les industries à enjeux de souveraineté (défense, aérospatial, infrastructures critiques), cela compte.
Service après-vente
à travers l'Europe
Notre équipe d'une trentaine de personnes opère depuis Carquefou, près de Nantes, avec des capacités d'intervention sur l'ensemble de l'Europe continentale. Support téléphonique le jour même en français, anglais.
Notre gamme de robots HSK animée par cette technologie
Chaque modèle de la gamme HSK tourne sur la même plateforme technologique sous-jacente, optimisée pour un cas d’usage spécifique :
Transpalette autonome, robot mobile pour déplacer des palettes jusqu’à 1000 kg
La technologie ne fait pas tout.
Un AMR performant ne se déploie pas seul. Notre équipe accompagne votre projet de l'audit Lean à la mise en service : analyse de flux, simulation, sélection multi-marques, intégration WMS/ERP et formation des équipes.
Découvrir notre méthode d'intégrationFoire aux questions
Oui, avec planification. Nous avons déployé plusieurs flottes mixtes où les AGV gèrent les itinéraires fixes à fort volume et les AMR gèrent les missions dynamiques. La coordination se fait au niveau du gestionnaire de flotte, typiquement par partitionnement de zones ou de fenêtres horaires.
Selon la charge utile et le cycle d'usage, entre 8 et 10 heures d'opération par charge. Tous les modèles HSK supportent la recharge automatique sur stations de recharge pendant les périodes d'inactivité, ce qui étend la disponibilité effective à 22-24 heures par jour.
Notre planificateur de trajectoires local tourne à 10 Hz, recalculant la trajectoire immédiate selon le dernier scan LIDAR. Quand un chariot entre dans la trajectoire planifiée de l'AMR, ce dernier ralentit, évalue les alternatives, puis se réachemine ou cède le passage selon la situation.
Notre logiciel est construit sur le framework open-source ROS 2, mais nos algorithmes propriétaires (SLAM, planification de trajectoires, orchestration de flotte) sont commerciaux et restent la propriété intellectuelle d'E-COBOT. C'est le même modèle que la majorité des fournisseurs de robotique industrielle.
La cartographie initiale et la configuration d'un AMR dans un nouvel environnement prennent typiquement 1 à 3 jours, selon la taille du site. Le déploiement en production avec formation complète des opérateurs ajoute 2 à 4 semaines. Total : 3 à 6 semaines entre la livraison et l'usage opérationnel.
Trois catégories : les environnements très réfléchissants (par exemple les surfaces poli miroir) qui perturbent le LIDAR ; les environnements avec températures ou expositions chimiques extrêmes au-delà de la plage de fonctionnement certifiée des robots ; et les environnements à très forte densité humaine où l'acceptabilité sociale devient le facteur limitant. Nous discutons de ces contraintes pendant la phase d'audit.
Échangeons sur votre projet AMR
Si vous évaluez les AMR pour votre site, l'étape suivante est une conversation technique. Nos ingénieurs parcourront avec vous votre environnement, vos contraintes et les questions d'intégration qui comptent pour votre projet.